Qu’est-ce que la technologie RTK ?
RTK signifie Real Time Kinematic. C’est une technologie de géolocalisation avancée basée sur les satellites GNSS (comme le GPS).
Contrairement au GPS classique qui offre une précision de 2 à 5 mètres, le RTK permet une précision centimétrique (1 à 3 cm).
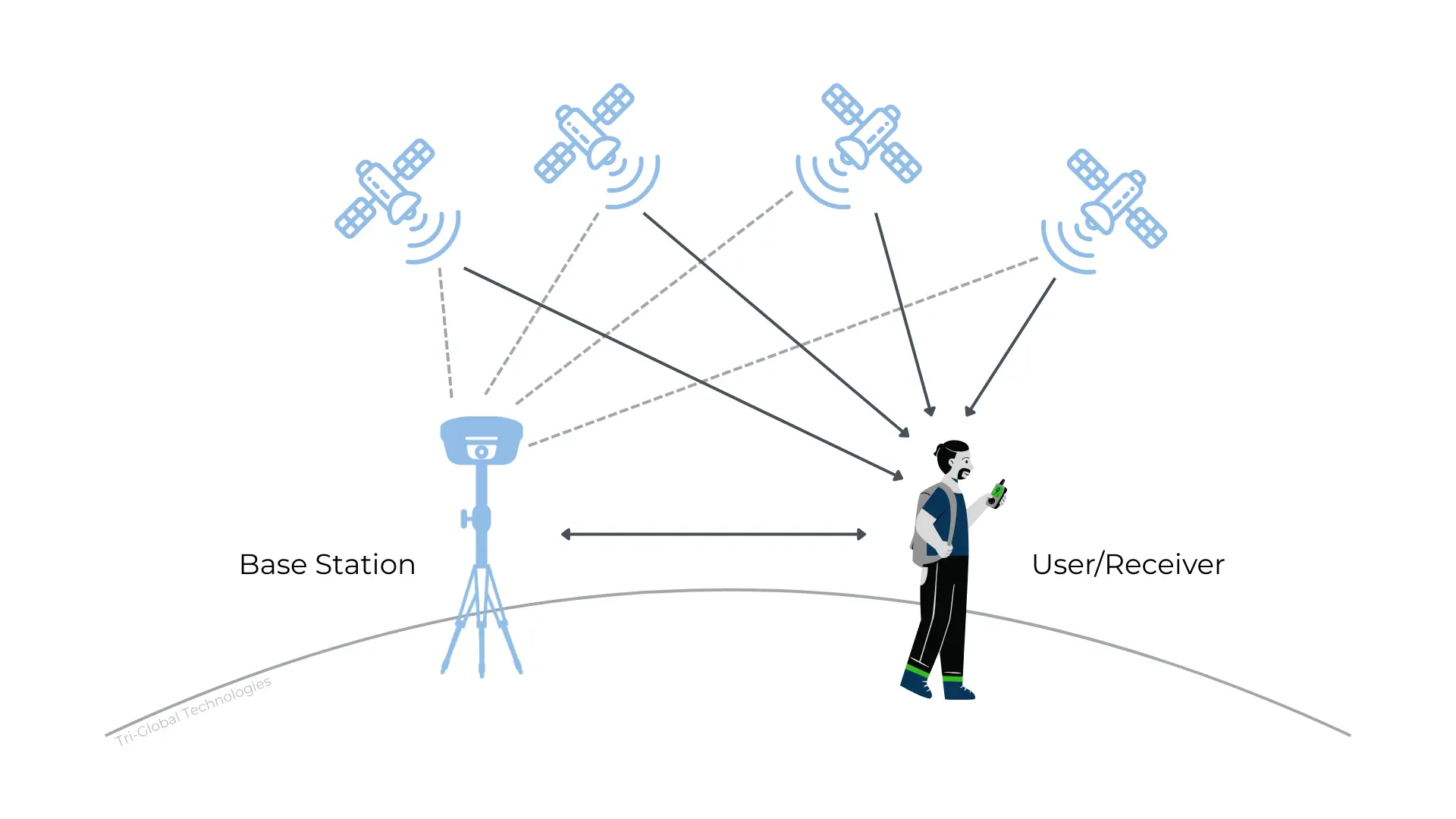
Le principe est simple :
- Les satellites envoient un signal de position.
- Une station de référence RTK installée dans le jardin reçoit ces signaux.
- Cette station calcule les erreurs du signal satellite.
- Elle transmet les corrections au robot tondeuse en temps réel.
Grâce à ces corrections, la tondeuse connaît sa position au centimètre près.

Les composants d’un système RTK
Un système RTK pour tondeuse robot se compose généralement de trois éléments principaux :
La tondeuse roboT
Elle possède un récepteur Global Navigation Satellite System (GNSS) avec la technologie Real-Time Kinematic positioning (RTK). Ce récepteur permet à la tondeuse de déterminer sa position avec une très grande précision, souvent de l’ordre de quelques centimètres.
Le récepteur embarqué dans la tondeuse reçoit deux types d’informations :
- les signaux des satellites GNSS (GPS, Galileo, etc.) pour calculer sa position approximative
- les corrections RTK envoyées par la station de référence ou par un réseau d’antennes via internet
Fonctionnement :
- capte les signaux satellites pour connaître sa position approximative
- reçoit les corrections RTK provenant des stations de référence
- corrige sa position en temps réel pour obtenir une localisation très précise
Grâce à cette combinaison GNSS + RTK, la tondeuse robot peut se déplacer de manière autonome, suivre des trajectoires précises et tondre la pelouse de façon organisée sans câble périphérique.

La station de référence (antenne RTK)
Pour certains modèles comme les robots KRESS ou MIIMO, la correction Real-Time Kinematic positioning (RTK) ne provient pas d’une antenne installée dans le jardin. Elle est fournie par un réseau d’antennes de référence réparties sur le territoire.
Ces stations sont installées à des positions fixes dont la localisation est connue avec une très grande précision. Elles comparent la position calculée avec les satellites GNSS à leur position réelle afin de déterminer les erreurs de mesure.
Ces stations couvrent de larges zones : une seule antenne peut fournir des corrections sur un rayon pouvant atteindre environ 30 km. Les corrections sont ensuite envoyées via internet vers le robot, ce qui permet d’améliorer fortement la précision de sa position (jusqu’à quelques centimètres).
Fonctionnement :
- capte les signaux satellites (GNSS)
- calcule les erreurs entre la position réelle et celle calculée avec les satellites
- envoie les corrections au robot via internet pour corriger sa position en temps réel
Grâce à ces corrections RTK, le robot peut se déplacer beaucoup plus précisément, même dans des environnements où le signal GNSS seul serait moins fiable.
Les satellites GNSS
Ils fournissent la position globale (latitude, longitude et altitude) partout sur la Terre. Les satellites envoient en permanence des signaux radio contenant leur position et l’heure exacte. Un récepteur (smartphone, GPS de voiture, drone, etc.) capte ces signaux et calcule sa position en mesurant le temps que met le signal à arriver.
Les systèmes utilisés incluent souvent :
-
Global Positioning System (GPS – États-Unis)
Environ 30 satellites. C’est le système le plus utilisé au monde et il est intégré dans presque tous les appareils GPS. -
Galileo (Europe)
Système développé par l’Union européenne. Il offre une très bonne précision et est souvent utilisé en combinaison avec le GPS dans les smartphones récents. -
GLONASS (Russie)
Système russe avec environ 24 satellites. Il est souvent utilisé en complément du GPS pour améliorer la couverture. -
BeiDou (Chine)
Système chinois avec plus de 30 satellites et une couverture mondiale depuis 2020.
Un récepteur doit capter au moins 4 satellites pour calculer sa position précise.
Plus il y a de satellites visibles, plus la précision et la fiabilité de la localisation sont élevées, surtout dans les villes, les montagnes ou les zones avec des obstacles.

Comment la tondeuse se déplace dans le jardin
Avec le RTK, la tondeuse ne se déplace plus de façon aléatoire comme les anciens modèles.
Elle fonctionne plutôt comme un tracteur agricole guidé par GPS grâce aux technologies Global Navigation Satellite System (GNSS) et Real-Time Kinematic positioning (RTK).
Lors de l’installation, on cartographie le jardin dans l’application. La tondeuse enregistre alors la forme du terrain et les différentes zones à gérer.
Fonctionnement :
- On cartographie le jardin dans l’application lors de l’installation
- On définit les zones de tonte et les zones interdites (massifs, piscine, potager, etc.)
- La tondeuse calcule un parcours optimisé généralement en lignes parallèles pour couvrir toute la surface
- Elle suit ce trajet avec une précision centimétrique grâce aux corrections GNSS RTK
Résultat :
- tonte plus rapide
- couverture complète du terrain
- moins de passages inutiles, donc moins d’énergie consommée et moins d’usure
Les avantages du RTK pour les tondeuses robots
Plus besoin de câble périphérique
L’installation est beaucoup plus simple : il suffit de placer l’antenne RTK (ou d’utiliser un réseau d’antennes) et de cartographier le jardin dans l’application. Il n’est plus nécessaire d’enterrer ou de fixer un fil autour du terrain.
Tonte plus efficace
Grâce à la précision du Global Navigation Satellite System (GNSS) RTK, le robot suit des lignes de tonte structurées, un peu comme sur un terrain de football.
Cela permet une tonte plus organisée et plus rapide.
Gestion de plusieurs zones
Dans l’application, on peut facilement créer et gérer différentes parties du jardin :
- différentes zones de tonte
- des couloirs de passage entre les zones
- des zones interdites (massifs, piscine, potager, arbres, etc.)
Le robot sait ainsi où il doit tondre et où il ne doit pas aller.
Mise à jour facile du jardin
Si le jardin change (nouveau massif, agrandissement de terrasse, installation d’une piscine…), il suffit de modifier la carte dans l’application.
Aucune modification physique n’est nécessaire dans le jardin.
Les limites du RTK
Malgré ses avantages, la technologie RTK a quelques contraintes.
Obstacles au signal satellite
Le signal des satellites Global Navigation Satellite System (GNSS) peut être perturbé ou affaibli par certains éléments de l’environnement :
- grands arbres
- murs
- bâtiments
- zones très encaissées (vallées, espaces très entourés d’obstacles)
Ces obstacles peuvent bloquer ou réfléchir les signaux satellites, ce qui réduit la précision du positionnement, même avec la correction Real-Time Kinematic positioning (RTK).
Dans ces cas, certains robots combinent le RTK avec d’autres technologies de perception pour maintenir une navigation fiable :
- des caméras pour reconnaître l’environnement
- des capteurs LiDAR pour cartographier les obstacles avec un laser
- des capteurs ultrason pour détecter les objets proches
Grâce à cette combinaison de technologies, la tondeuse robot peut continuer à se déplacer correctement même lorsque le signal satellite est moins bon.
Pourquoi cette technologie devient la norme ?
Le Real-Time Kinematic positioning (RTK) est déjà très utilisé dans plusieurs domaines nécessitant une localisation très précise :
- l’agriculture de précision 🚜 (guidage automatique des tracteurs)
- les drones pour des vols et des prises de mesures très précis
- la topographie pour réaliser des relevés de terrain avec une précision centimétrique
Son arrivée dans les tondeuses robots marque une nouvelle génération de machines basées sur la technologie Global Navigation Satellite System (GNSS) :
- installation simplifiée (plus besoin de câble périphérique)
- navigation intelligente avec cartographie du jardin
- efficacité de tonte bien supérieure grâce à des trajectoires optimisées
C’est pour cela que de nombreux fabricants adoptent désormais cette technologie dans leurs modèles haut de gamme, afin d’offrir des robots plus précis, plus faciles à installer et plus performants.